University of Alberta
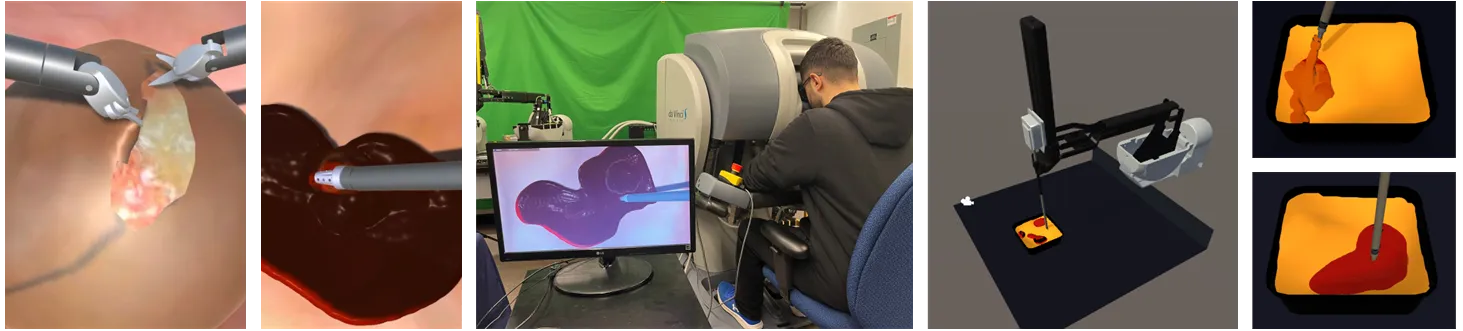
Realistic and real-time surgical simulators play an increasingly important role in surgical robotics research, such as surgical robot learning and automation, and surgical skills assessment. The ability to simulate the diverse types of objects and contact-rich manipulation tasks, such as tissue cutting and blood suction, is important as they typically present in surgeries. We propose another surgical simulator for the da Vinci Research Kit (dVRK), CRESSim, that enables simulating various contact-rich surgical tasks involving different surgical instruments, soft tissue, and body fluids. The real-world dVRK console and the master tool manipulator (MTM) robots are incorporated into the system to allow for teleoperation through virtual reality (VR). With CRESSim, we aim to advance surgical autonomy and augmented dexterity for surgeons by developing autonomous agents capable of completing surgical subtasks.
Learn more about the technical details here. If you find this project helpful for your research, please consider citing one or more of the papers listed below.
New! We developed a material point method (MPM) library for CRESSim. Check out our latest paper to learn more.
Yafei Ou, Mahdi Tavakoli
2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) [paper] [arxiv] [bib] [code]
Yafei Ou, Mahdi Tavakoli
IEEE Transactions on Automation Science and Engineering [paper] [arxiv] [bib] [code]
Sadra Zargarzadeh, Maryam Mirzaei, Yafei Ou, Mahdi Tavakoli
IEEE Robotics and Automation Letters [paper] [arxiv] [bib]
Yafei Ou, Sadra Zargarzadeh, Paniz Sedighi, Mahdi Tavakoli
2024 21st International Conference on Ubiquitous Robots (UR) [paper] [arxiv] [bib]
Yafei Ou, Abed Soleymani, Xingyu Li, Mahdi Tavakoli
IEEE Robotics and Automation Letters [paper] [bib]